步進電機主要分為永磁式(PM)、可變磁阻式(VR)以及混合式(HB)這三類,混合式是前兩者的雜交體或者或混合體(hybrid)。因此從原理上來看,永磁式和可變磁阻式可謂是最基本的類型。我們前面的文章中對混合式和永磁式的步進電機已經做過詳細的介紹,本文來介紹一下可變磁阻式步進電機(Variable Reluctance stepping motor),也稱VR型步進電機。
一、VR型步進電機的結構
VR型步進電機的定子和轉子都由軟磁材料構成,無需永磁體。結構上來看,轉子是均勻的齒狀結構(如圖 所示),定子上有很多成對的勵磁繞組,稱為極,每個極上也有與轉子相同的齒狀結構,相鄰的極上的齒有意跟轉子上的齒錯開特定角度。混合式步進電機很好的繼承了這一結構,兩者在步距角的產生原理上是一樣的。
圖1 VR型步進電機的轉子結構
圖2展示了典型的三相VR步進電機的結構示意圖。定子上有三對磁極,每一對磁極上繞有一相繞組。轉子鐵芯和定子極靴上的齒距相等,圖中轉子鐵芯上有40個齒,每個齒的空間角度便是9°。
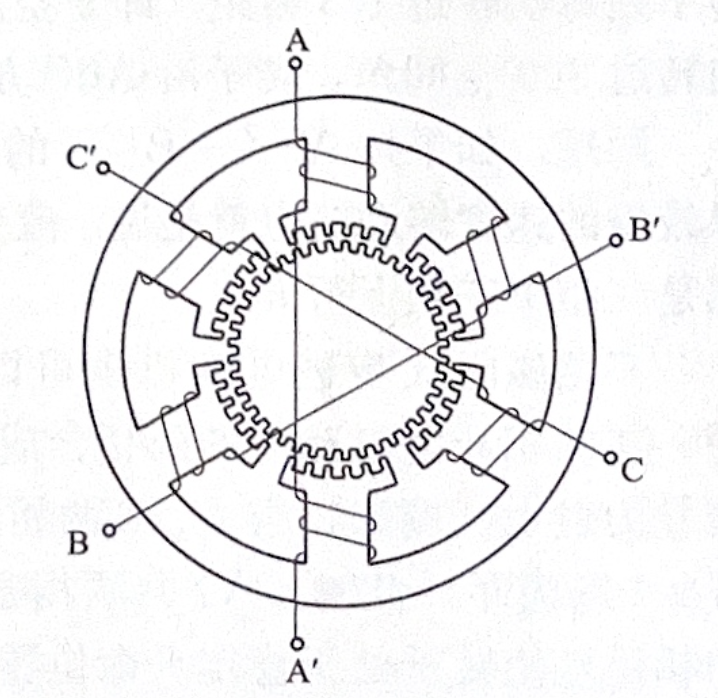
圖2 典型的3相VR型步進電機的結構示意圖
可以看到轉子上的齒與其中一相(A)定子齒對齊時,與其他兩相(B/C)的定子齒總是交錯的(如圖 所示),這個交錯的角度分別為1/3齒(3°),這種設計的用意我們放在下面步距角原理處解釋。
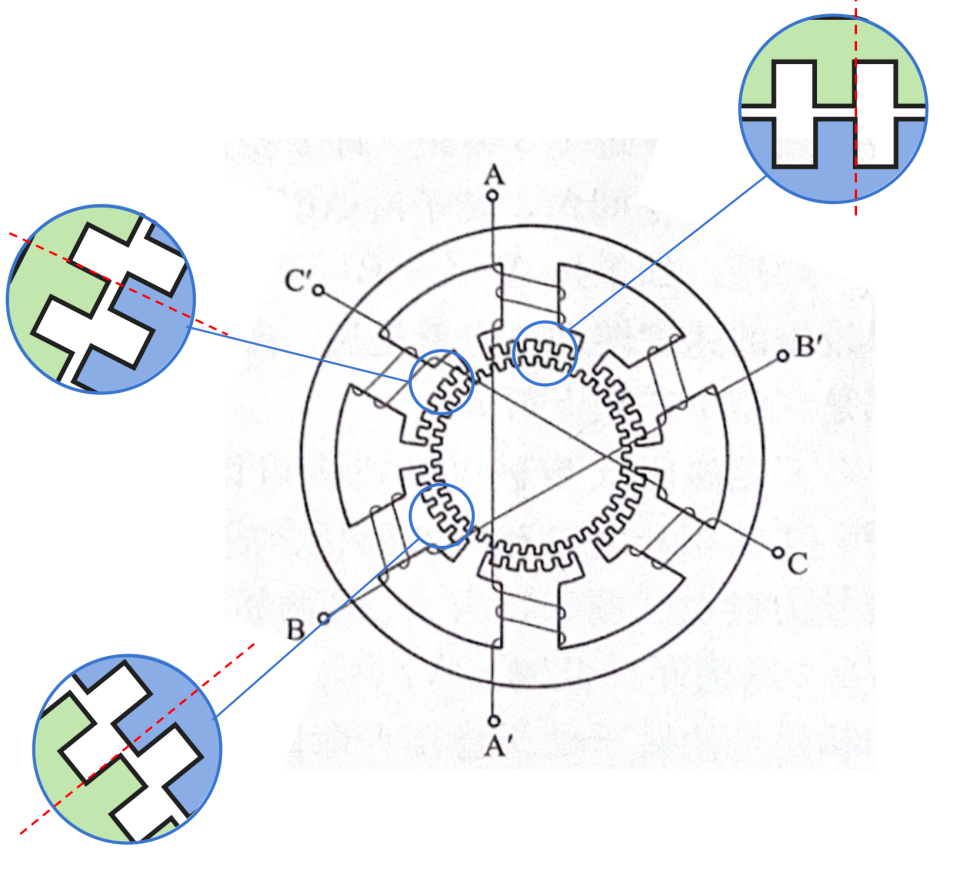
圖3 三相定子齒和轉子齒的相對關系
二、VR型步進電機的原理
所為可變磁阻式步進電機,其原理便是利用“磁場系統總是傾向于達到磁阻最小的狀態”的原理來驅動轉子運動。磁場系統磁阻最小時,整體能量最低,系統總是趨向于能量最低的狀態,跟“水往低處流”是一個道理。
想象一下磁鐵隔空吸引一根釘子,VR型步進電機的原理就是這個。
回到VR型步進電機的定轉子結構上,顯然轉子定子齒對齊的時候氣隙最小,磁阻最小,而齒對槽時氣隙最大,磁阻最大。
假設初始時,A相通電,那么顯然A相定子極的齒會跟轉子齒一一對應,達到磁阻最小的狀態(如圖3所示)。
然后,我們切換到B相通電,此時,由于B相的定子極齒和轉子齒錯開了1/3齒距,顯然不是磁阻最小狀態,因此在定子極的吸引下,轉子將逆時針轉動1/3齒,與B相定子齒對齊。
同樣的道理,再切換到C相通電,此時C相定子齒和轉子齒仍是錯開1/3齒,那么轉子又將繼續逆時針轉動1/3齒。
如此循環往復,按照A-B-C-A的順序通電,轉子就連續轉動了起來(逆時針),步距角就是1/3齒對應的角度即3°。反過來按照A-C-B-A的順序通電,那么電機將順時針旋轉。
從三相VR步進電機推廣開來,四相、五相以及更多相的VR步進電機原理是一模一樣的,只是相鄰定子極齒要錯開1/p個齒的角度,其中p是電機的相數,而這個錯開的角度就是步距角。因此對于VR步進電機,步距角θ=(1/p)*(360°/Z),即360°/(pZ),其中p是相數,Z是轉子齒數。
三、VR型步進電機的控制
上文中提到了當三相單獨按順序通電時,電機將以步距角θ為步長轉動。通電順序為A-B-C-A,或者反過來。
也可以同時兩相通電,這樣兩相磁場的合成磁場的方向正好處于兩個單相通電磁場方向的夾角中線,也就是說AB相通電的的合成磁場方向
將使得轉子齒和A相齒交錯1/6,和B相齒也交錯1/6齒。而后通電順序按照AB-BC-CA-AB的模式進行改變,轉子仍將以步距角θ為步長轉動。
如果我們單相-雙相輪流通電,按照A-AB-B-BC-C-CA-A這樣的節奏通電,也就是一個周期6拍,顯然這樣每一步轉子偏轉的角度就是1/6齒,那么轉子就將以θ/2的步長轉動了,這跟混合式步進電機的半步驅動是一樣的道理。
那么推而廣之,假如我們不僅控制各相的通斷,而且還控制相電流大小,這樣就可以進一步精細調控合成磁場的方向,進而形成更加小的步長,這便是細分驅動了。
四、VR型步進電機的特點
(1)跟混合式步進電機一樣(應該說混合式步進電機跟VR式一樣),VR式步進電機的氣隙很小,這主要還是為了增大轉矩,但由于只有相互吸引的作用力,對比混合式步進電機,VR型步進電機的力矩要小很多。
(2)VR型步進電機的轉子是軟磁材料制成,因此齒數可以做的比較大,再疊加上定子相數,步距角可以做的很小,精度相對PM電機要好很多。
(3)由于VR型步進電機不用永磁體,因此在制造成本上比混合式步進電機要低,但由于氣隙小,定轉子也都要進行精加工,因此對比PM步進電機,成本不一定低。
(4)由于VR型步進電機無永磁體,斷電時自然也就沒有定位力矩了。
綜上所述,VR型步進電機是一類單純利用磁阻驅動的電機,結構上比較簡單,驅動原理也比較好理解。VR型步進電機的原理決定了它的特殊結構和特點,并應用在很多特定的場景之中。































