行星齒輪減速機(jī)是最常見(jiàn)的電機(jī)減速機(jī)。如圖1所示,行星齒輪減速機(jī)包括太陽(yáng)輪、行星輪、行星架和內(nèi)齒圈四個(gè)主要部件構(gòu)成。常見(jiàn)的工況下,力矩從太陽(yáng)輪輸入,內(nèi)齒圈固定,行星輪軸固定在行星架上,太陽(yáng)輪帶動(dòng)行星輪自轉(zhuǎn)的同時(shí),帶動(dòng)行星架圍繞太陽(yáng)輪公轉(zhuǎn),力矩從行星架輸出。
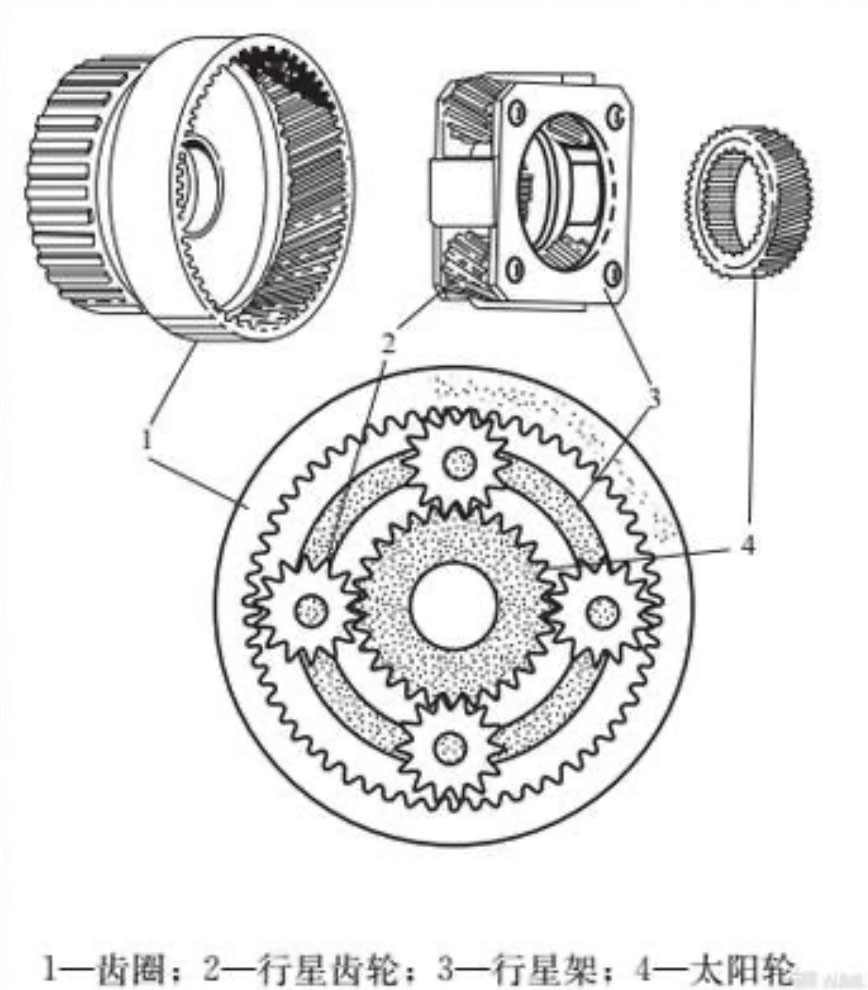
圖1 行星齒輪減速機(jī)結(jié)構(gòu)
一、行星齒輪的減速比推導(dǎo)
圖2是一個(gè)行星減速機(jī)構(gòu)的示意圖。
r0為太陽(yáng)輪半徑,r1為行星輪半徑,r2為內(nèi)齒圈半徑。
Zs為太陽(yáng)輪齒數(shù),Zr為齒圈齒數(shù)。
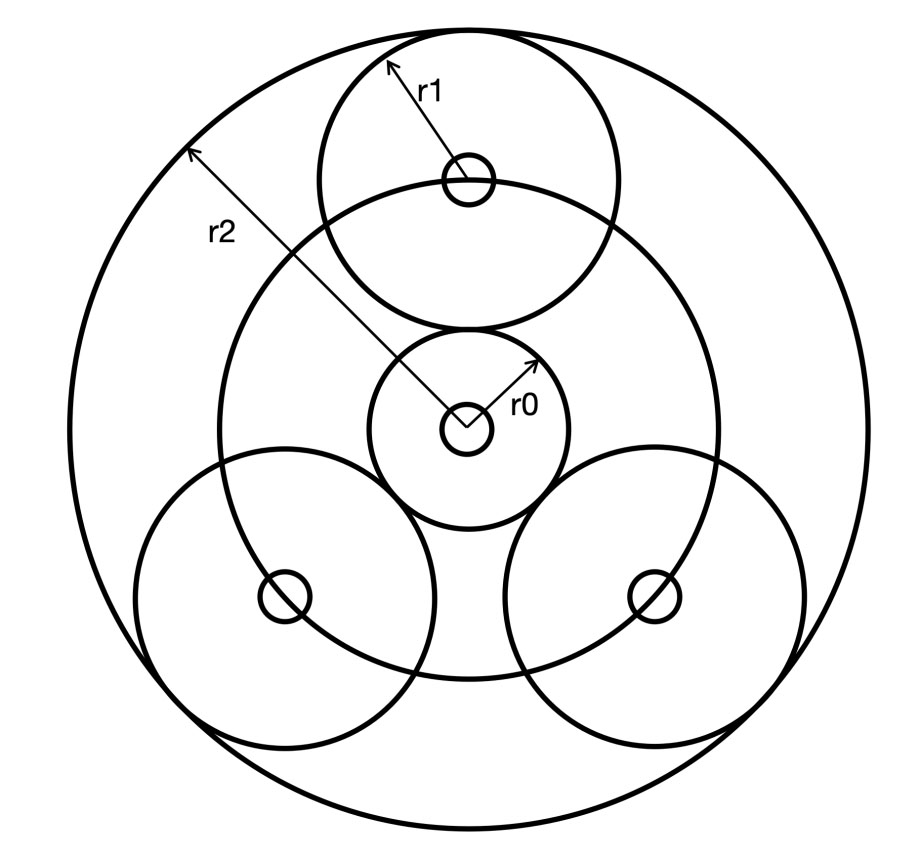
圖2 行星減速機(jī)示意圖
以下從兩個(gè)角度來(lái)推導(dǎo)減速比。
(1)從齒輪嚙合的行程來(lái)推導(dǎo)。
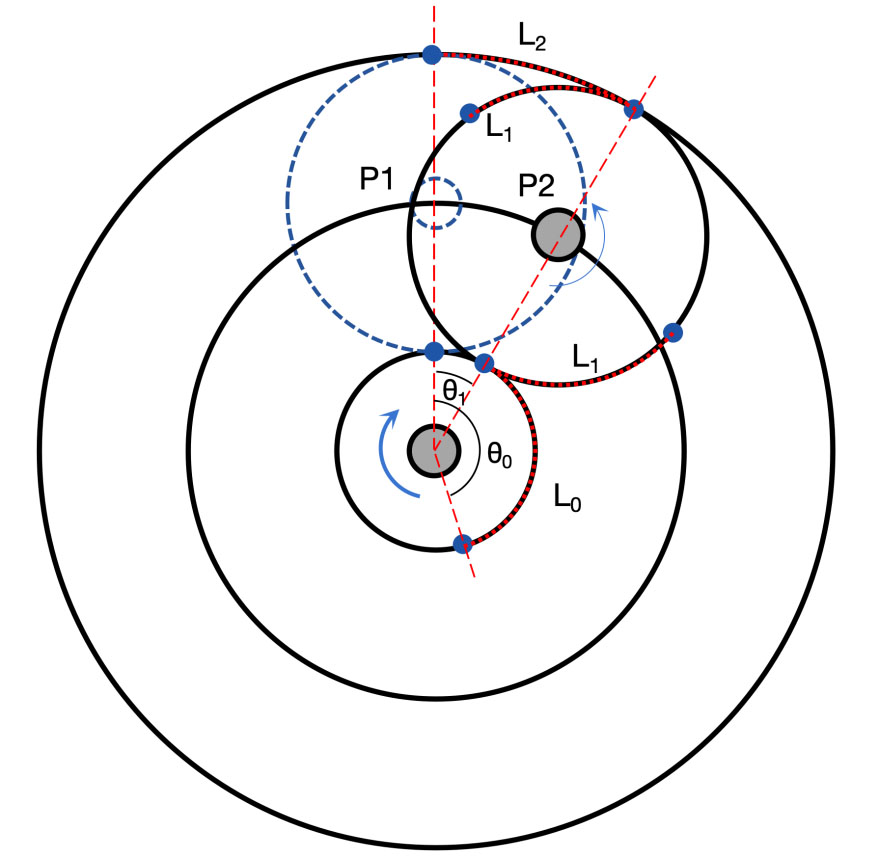
圖3 行星減速機(jī)示意圖
圖3展示了太陽(yáng)輪旋轉(zhuǎn)θ0角度時(shí),帶動(dòng)行星輪從P1位置移動(dòng)到P2位置,行星架轉(zhuǎn)動(dòng)了θ1角度,其中,太陽(yáng)輪和行星架順時(shí)針旋轉(zhuǎn),行星輪逆時(shí)針旋轉(zhuǎn)。在圖3中,用紅色的虛線圓弧標(biāo)注了太陽(yáng)輪、行星輪、內(nèi)齒圈齒輪嚙合的軌跡,長(zhǎng)度分別是L0、L1和L2,顯然有:

對(duì)太陽(yáng)輪有:

對(duì)內(nèi)齒圈有:

因此減速比

而由于齒輪相互嚙合,所以齒數(shù)比等于半徑比,即:

所以:

也就是說(shuō),行星齒輪的減速比等于內(nèi)齒圈和太陽(yáng)輪齒數(shù)比加1。
(2)從功率角度推導(dǎo)。
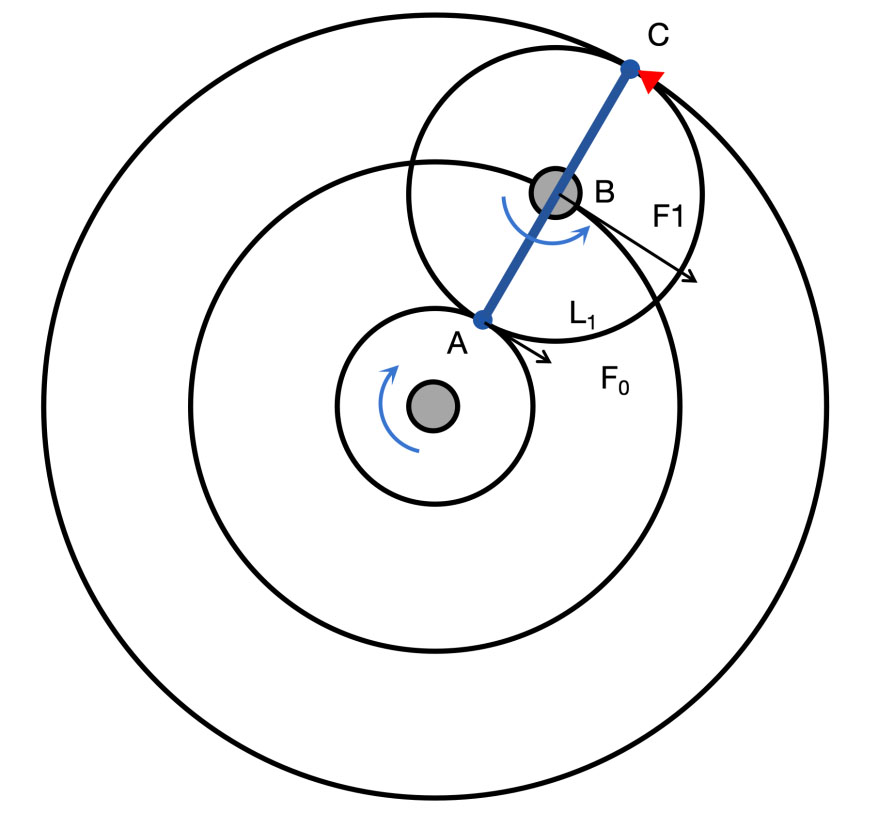
圖4 行星減速機(jī)示意圖
假設(shè)輸入軸的功率為P0,輸入轉(zhuǎn)矩為T0,太陽(yáng)輪轉(zhuǎn)速為ω0。

那么在太陽(yáng)輪和行星輪的接觸點(diǎn),行星輪受到的切向力為F0,n為行星輪的個(gè)數(shù)。

這時(shí)的行星輪可以看成一個(gè)杠桿ABC,支點(diǎn)在C點(diǎn),在A點(diǎn)輸入力F0,在B點(diǎn)輸出力F1應(yīng)為F0的兩倍,那么:

行星輪對(duì)行星架施加的總力矩T1的做功功率為P1,行星架轉(zhuǎn)速為ω1.那么:

當(dāng)系統(tǒng)不存在能量損耗時(shí):

于是:

那么減速比:

二、行星齒輪減速器的優(yōu)勢(shì)
(1)分散力矩,降低單個(gè)齒應(yīng)力。可以看到對(duì)于平行軸減速機(jī),輸入/出齒的力矩全部施加在單個(gè)齒上,應(yīng)力也集中在這個(gè)接觸點(diǎn)上。但是對(duì)于行星減速機(jī),同樣的輸入/出力矩分散在多個(gè)行星輪與太陽(yáng)輪/內(nèi)齒圈的接觸齒上,降低了單個(gè)齒的應(yīng)力。
如圖5所示,兩個(gè)單級(jí)減速機(jī)構(gòu)的輸入力矩相同,但行星減速機(jī)輸入齒的局部應(yīng)力是平行軸減速機(jī)的1/3倍,繼續(xù)增加行星輪還能降得更低。對(duì)于輸出齒也是同樣的道理。
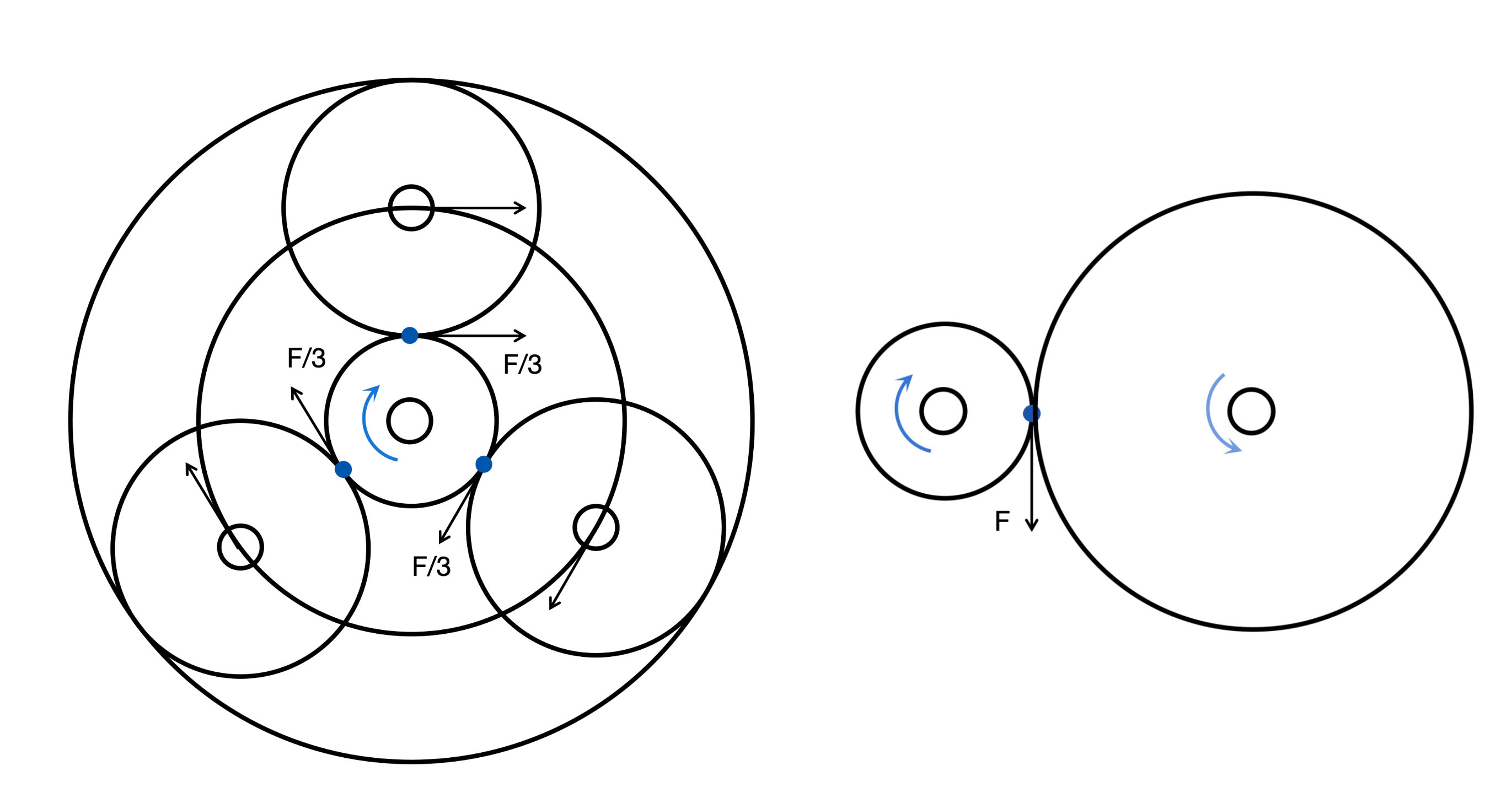
圖5 行星減速機(jī)和平行軸減速機(jī)的輸入/出齒受力示意圖
(2)軸的徑向合力為零,僅僅受到到扭矩,相同軸可以輸出更大的扭矩。我們?cè)诋嬍疽鈭D時(shí),兩個(gè)齒輪之間的作用力都當(dāng)做切向力來(lái)處理,但實(shí)際上,齒輪嚙合過(guò)程中的合力并非切向,而是會(huì)在徑向有個(gè)分力。如圖6所示,平行軸減速機(jī)的輸入齒受到一個(gè)徑向的分力,這個(gè)力通過(guò)齒輪傳遞到軸承再傳遞到軸,對(duì)軸和軸承都會(huì)造成額外的負(fù)擔(dān),降低系統(tǒng)的壽命,所以設(shè)計(jì)時(shí)只能增加軸徑進(jìn)行補(bǔ)償。而行星齒輪減速機(jī)的輸入齒,雖然每個(gè)接觸點(diǎn)都有徑向分力,但這幾個(gè)分力關(guān)于軸心對(duì)稱,因而相互抵消,從而使得軸以及軸承在徑向上沒(méi)有受力,僅承擔(dān)扭矩,因此軸和軸承都可以用更細(xì)的尺寸。對(duì)于輸出軸也是一樣的道理。
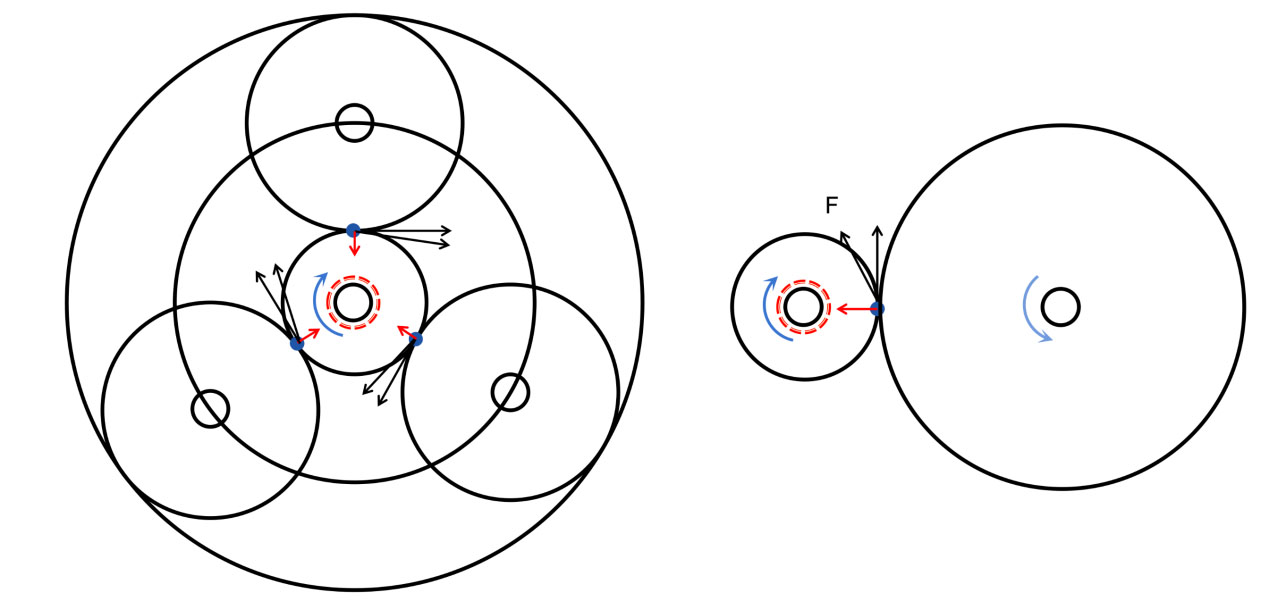
圖6 行星減速機(jī)和平行軸減速機(jī)的輸入齒的受力分解示意
結(jié)構(gòu)緊湊,小尺寸實(shí)現(xiàn)大減速比。行星齒輪減速機(jī)的大齒輪和小齒輪同軸,不同級(jí)的減速機(jī)構(gòu)可以疊放,因此結(jié)構(gòu)非常緊湊。而對(duì)于普通平行軸減速機(jī),齒輪軸不能和齒輪盤干涉,所以整體尺寸較大,空間利用率較低。如圖7所示,對(duì)于單級(jí)減速比為i的減速機(jī)構(gòu)而言,行星齒輪機(jī)構(gòu)的尺寸為平行軸減速機(jī)構(gòu)尺寸的(i-1)/(i+1),以i=5為例,那么前者是后者尺寸的2/3,尺寸降低33%。隨著減速級(jí)數(shù)增加,尺寸減幅將進(jìn)一步擴(kuò)大。
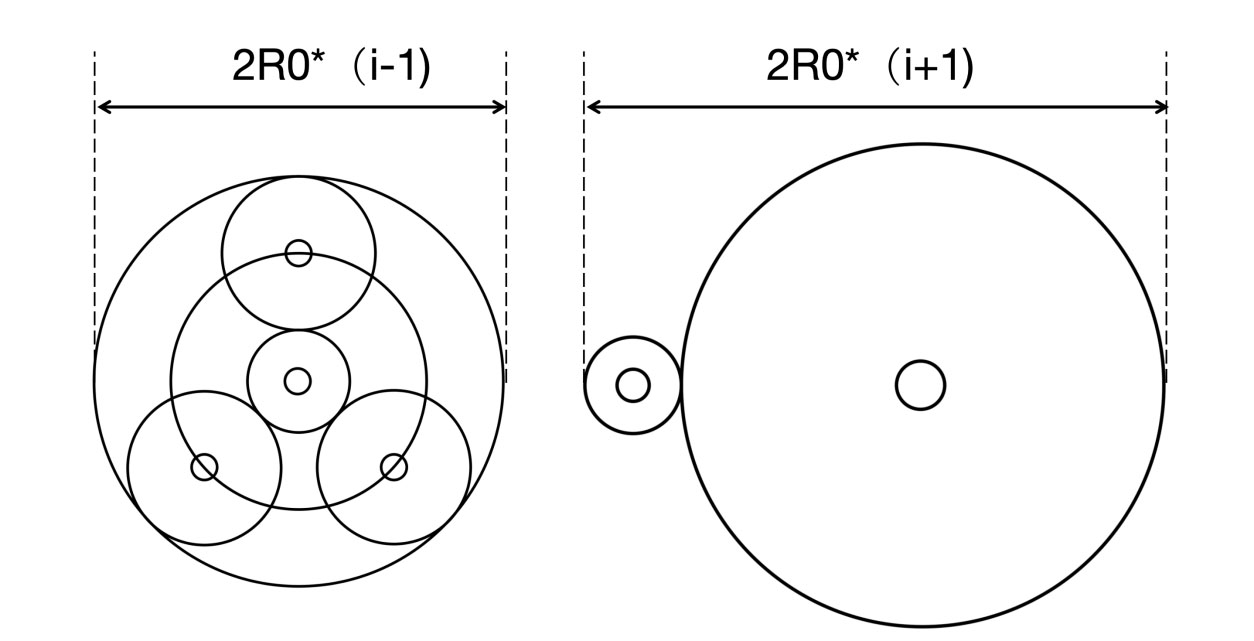
圖7 相同減速比的單級(jí)行星減速機(jī)和平行軸減速機(jī)的尺寸對(duì)比




電機(jī)")
電機(jī)")
電機(jī)")
電機(jī)")
")
電機(jī)")
")
動(dòng)器")
動(dòng)器")
動(dòng)器")
















